Robotics Engineer | Aerial Robotics | Autonomous Vehicles
I am passionate about advancing drone autonomy and autonomous vehicles by employing cutting-edge research into software and hardware solutions. At the University of Maryland, I led a team in developing a 5G public safety drone network, integrating AI-driven human tracking, 5G-enabled BVLOS operations, and MAVLink-based communication. My work also includes containerizing PX4 simulation environment for seamless development of perception and localization modules in simulated environments.
My research spans autonomous ground vehicles, where I built an AI-powered e-scooter with real-time localization and computer vision algorithms. Using ROS, Python, and deep learning, I developed a homography-based pose estimation system by leveraging stop signs as visual landmarks. I also containerized multiple perception modules with Docker and GPU acceleration, optimizing performance for embedded platforms.
I contributed to Carla Sim by developing a GPU-accelerated Docker image with ROS2 bridge, enabling quick setup and deployment of simulation environments for autonomous vehicle research. This image has been downloaded by 50+ researchers and engineers.
As an engineer, I bring expertise in robotics software, embedded systems, and AI-driven autonomy. I excel at integrating diverse technologies, optimizing performance, and developing scalable autonomy solutions. I thrive in collaborative environments and am eager to contribute to teams tackling real-world robotics challenges. Let’s connect and innovate together!
- Languages: C/C++, Python, Embedded C, MATLAB, SQL
- Robotics Development: Localization, Perception, Path Planning, Simulation of autonomous agents, Reinforcement Learning
- Software Libraries and Tools: ROS2, OpenCV, YOLOv7, PyTorch, MAVROS, MAVLink, PX4, CARLA(Unreal Engine), Autoware Universe, TensorFlow, scikit-learn, SolidWorks
- Software Development: Git, Docker, CMake, Google Test, CodeCov, Jira
- Currently Learning: Localization, State Estimation, and MAVROS
PROJECTS
Target detection and tracking using gimbaled UAV camera
Developed a MAVROS, ROS2, and PX4 based target tracking system to track targets in real-time using an on-board gimbaled camera. The system is designed such that it can be run onboard the drone using a companion computer or offboard on a dedicated processing server.

Localization Using Stop Signs
Developed neural-network based localization algorithm that uses stop signs to estimate vehicle pose.
Pick and place using IK solver for KUKA Youbot
Implemented a IK solver for manipulator arm of KUKA Youbot and 4-wheel mechanum chassis kinematics for picking and placing of objects in different settings.
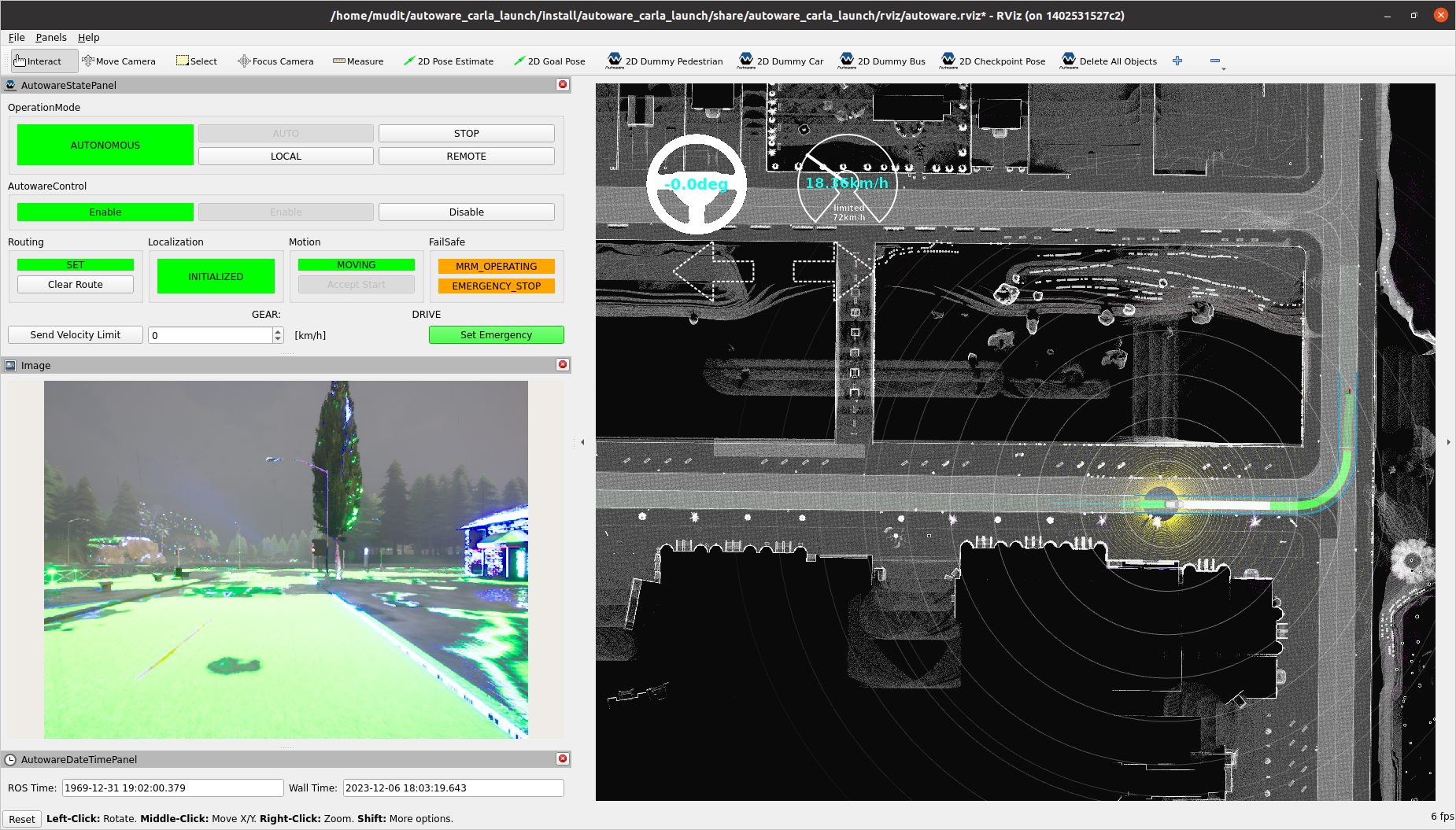
Autonomous Driving Using Autoware Universe and Carla Sim
Autonomous vehicle control done using Autoware Universe interfaced with Carla Simulator. Also checkout my open-source contribution to run Carla Sim with ROS2 bridge all in Nvidia GPU accelerated Docker container.
Self-balancing algorithm for quadrupedal robots
A low-latency self-balancing algorithm for quadrupedal robots (like Boston Dynamics' Spot) developed using C++, inverse kinematics, and trigonometry.
Reinforcement learning in custom Gym environment
Navigating a Turtlebot 3 in a custom continuous 2D environment using an implementation of TD3 RL algorithm
Robot Path Planning using A* algorithm
Implementation of A* path planning algorithm in a 2D representation of world with obstacles.
Vision based garbage-collection robot
C++ and ROS2 Humble-based package to collect color-coded garbage blocks using Turtlebot3, simulated on Gazebo.
University of Maryland | College Park, MD | Jun 2024 - Present
Software Engineer
- Led a team of 5 for the development of hardware and software modules of a 5G public safety drone network.
- Engineered a human tracking module for a gimbaled UAV using YOLO, MAVROS, Python, and PX4 simulator.
- Dockerized the official PX4 repo to run perception and localization modules in the Sonoma Raceway gazebo world.
- Interfaced a 5G modem with Jetson Orin NX, enabling BVLOS drone operation using 5G network, Tailscale, and MAVLink.
ReZoom - Autonomous E-Scooter, University of Maryland | College Park, MD | Feb 2023 - May 2024
Research Assistant
- Designed and assembled 3rd version of the e-scooter using Fusion 360, 3D printing on UltiMaker S5, Nvidia Jetson Orin, Zed2i
stereo camera, Phiget IMU, Reach M+ GPS, ODrive BLDC motor controller, and optical encoders.
- Conceptualized and developed a Homography-based vehicle localization algorithm to estimate e-scooter pose w.r.t.
stop signs using YoloV7, Python, ROS TF, OpenCV, and PyTorch, achieving a real-time frame rate of 15 Hz on Jetson Orin.
- Containerized 3 computer vision ROS modules using Docker with Nvidia CUDA acceleration and USB port forwarding.
RAAS Lab, University of Maryland | College Park, MD | Aug 2023 - Dec 2023
Independent Research
- Designed custom hardware accelerated (Nvidia GPU support) Docker images to run Carla Sim with ROS 2 bridge.
- Achieved fully autonomous vehicle control in 5 Carla Sim maps with mixed traffic (bicycles, sedans, SUVs, and Trucks) using
Autoware Universe on a Tesla Model 3, simulated in Carla Sim.
TRC Robotics | Remote | May 2023 - Aug 2023
Robotics Software Intern
- Designed modules in Embedded-C to generate CAN data frames for controlling the differential-drive robot in 5 different open
and closed-loop operating modes, achieving reliable communication at 2m wire length and data rate of 512 kbps.
- Achieved autonomous navigation in a 80x50 m2 simulated restaurant using ROS (Melodic) navigation stack and Gazebo.
Tata Digital Ltd. | Mumbai, India | Aug 2020 - Jun 2022
Data Engineer
- Optimized SQL queries and Postgres database for customer service module, reducing response time by 60% across 10 brands.
- Resolved 50+ high priority production defects using SQL, and JIRA, following Agile Methodologies and coordinating with
multiple stakeholders - product managers, Orchestration (API) team, QA team, and other Data Engineers.
ARDE, DRDO | Pune, India | May 2019 - Jul 20219
Research Intern
- Simulated a PID controller for a BLDC motor on Simulink and implemented it using embedded-C on a Sharc ADSP board.
- Improved accuracy of actuator position curve tracking by 15% by incorporating ‘fuzzy logic PID controller’ on Simulink.
